 |
|
 |
|
|
|
|
| |
|
|
|
|
|
| |
Embedded
models-
MIDAS
|
| |
|
|
|
|
|
| |
MIDAS
contains
representations
of
human
cognitive,
perceptual
and
motor
operations
in
order
to
simulate
control
and
supervisory
behavior.
These
models
describe
(within
their
limits
of
accuracy)
the
responses
that
can
be
expected
of
human
operators
interacting
with
dynamic
automated
systems.
The
fundamental
human
performance
elements
of
these
representations
can
be
applied
to
any
human-machine
environment.
Tailoring
for
the
particular
requirements
of
a
given
domain,
largely
in
terms
of
human
operator's
knowledge
and
rule-base
is,
of
course,
a
necessary
step
as
the
model
is
moved
among
domains.
Each
of
the
human
operators
modeled
by
MIDAS
contains
the
following
models
and
structures,
the
interaction
of
which
will
produce
a
stream
of
activities
in
response
to
mission
requirements,
equipment
requirements,
and
models
of
human
performance
capabilities
and
limits.
Physical
Representations:
An
anthropometric
model
of
human
figure
dimensions
and
dynamics
has
been
developed
in
conjuntion
with
the
Graphics
Laboratory
of
the
University
of
Pennsylvania.
The
model
used
is
called
Jack
,
and
is
an
agent
in
the
overall
MIDAS
system.
The
Jack
agent's
purpose
is
to
represent
human
figure
data
(e.g.,
size
and
joint
limits)
in
the
form
of
a
mannequin
which
dynamically
moves
through
various
postures
to
represent
the
physical
activities
of
a
simulated
human
operator.
The
graphic
representation
of
the
Jack
agent
also
assists
designers
in
questions
of
cockpit
geometry,
reach
accommodation,
restraint,
egress,
and
occlusion.
Perception
and
Attention:The
simulated
human
operator
is
situated
in
an
environment
where
data
constantly
streams
into
the
operator's
physical
sensors.
While
auditory,
haptic,
and
proprioceptive
systems
serve
an
important
role
in
the
perception
of
information
relevant
to
the
operator
of
vehicles,
within
MIDAS
the
present
focus
has
been
on
modeling
visual
perception.
In
brief,
during
each
simulation
cycle,
the
perception
agent
computes
what
environment
or
cockpit
objects
are
imaged
on
the
operator's
retina,
tagging
them
as
in/out
of
the
peripheral
and
foveal
fields
of
view
(90
and
5
degrees,
respectively),
in/out
of
the
attention
field
of
view
(variable
depending
on
the
task),
and
in/out
of
focus,
relative
to
the
fixation
plane.
An
environmental
object
can
be
in
one
of
several
states
of
perceptual
attention.
Objects
in
peripheral
visual
fields
are
perceived
and
attentionally
salient
changes
in
their
state
are
passed
to
the
updatable
world
representation.
In
order
for
detailed
information
to
be
fully
perceived,
e.g.,
reading
of
textual
messages,
the
data
of
interest
must
be
in
focus,
attended,
and
within
the
foveal
field
of
view
for
200
ms.
The
perception
agent
also
controls
the
simulation
of
commanded
eye
movements
via
defined
scan,
search,
fixate,
and
track
modes.
Differing
stimuli
salience
and
pertinence
are
also
accommodated
through
a
model
of
pre-attention
in
which
specific
attributes,
e.g.
color
or
flashing,
are
monitored
to
signal
an
attentional
shift.
MicroSaint Sharp (Simulation Engine):
Micro Saint Sharp is a full-featured, discrete-event simulation modeling environment that simulates complex processes and solve difficult problems spanning a number of complex application domains. Micro Saint Sharp allows MIDAS to operates according to its hybrid discrete-continuous modeling principle. Micro Saint Sharp allows rapid model development through the use of flow charts and task networks. Micro Saint Sharp selects and sequences operator procedures based on information that is fed to it from the perception model inside of MIDAS. Micro Saint Sharp is a modular and flexible code base that can be used for a variety of applications. Micro Saint Sharp uses a plug-in interface and object-oriented model development, allowing easy integration with other external software applications. Micro Saint Sharp uses the Microsoft C# language which allows more complex mathematical and logical expressions and algorithms to be used in the model allowing more variable options (including integer, floating point, string, boolean, object as well as local and global variables). A key benefit to Micro Saint Sharp is its transparency through its use of an effective visualization environment and its ability to process model components in a multi-threaded fashion.
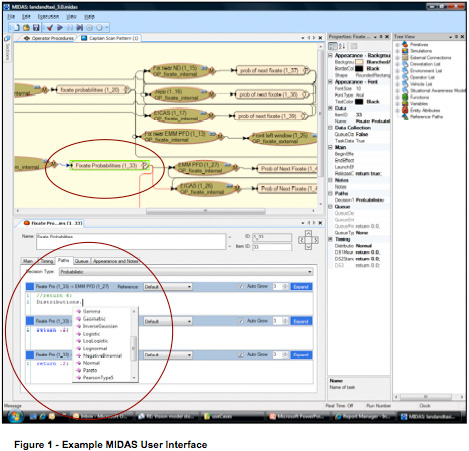
An example of the interaction between MIDAS and Micro Saint Sharp can be found below. Given vehicle location with respect to a feature in the environment, visibility and lighting levels and scan pattern, the perception model will inform Micro Saint Sharp when the perception level of the operator changes with respect to the feature. Likewise, scan patterns of the crewstation equipment coupled with dwell time effect perception level changes with respect to equipment. Given a perception level change and the operator procedures, Micro Saint Sharp may initiate an operator task to the motor control model such as a reach-object, a speaking task or a change of scan pattern. The figure below also illustrates the visual scan model within MIDAS. This visual scan model currently uses a probabilistic scan pattern that selects from a series of response distributions to accurately reflect a human’s visual scanning performance.
 |
| |
| |
|
|
|
|
|
| |
The
other
analysis
path
supported
by
MIDAS
is
a
dynamic
simulation.
The
Simulation
Mode
provides
facilities
whereby
specifications
of
the
human
operator,
cockpit
equipment,
and
mission
procedures
are
run
in
an
integrated
fashion.
Their
execution
results
in
activity
traces,
task
load
timelines,
information
requirements,
and
mission
performance
measures
which
can
be
analyzed
based
on
manipulations
in
operator
task
characteristics,
equipment,
and
mission
context. |
| |
|
|
|
|
|
|
|
|