 |
|
 |
|
|
|
|
| |
|
|
|
|
|
| |
MIDAS 1.0 |
| |
|
|
|
|
|
| |
The
existing
system
contains
a
set
of
integrated
software
modules,
editors,
and
analysis
tools
produced
in
C,
C++,
and
Lisp,
with
an
architecture
based
in
agent-actors
theory.
Each
major
component,
or
agent,
contains
a
common
message
passing
interface,
a
body
unique
to
that
agent's
purpose,
and
a
common
biographer
structure
which
keeps
track
of
important
state
data
or
events
for
analysis.
This
uniform
representation
was
chosen
to
provide
modularity.
The
total
system
contains
350,000
executable
lines
of
code,
with
about
half
of
the
total
associated
with
a
dynamic
anthropometry
model.
Once
a
user
inputs
or
specifies
operator,
task,
and
equipment
characteristics,
MIDAS
operates
in
two
major
modes.
The
first,
Interactive
Mode,
supports
scenario-independent
layout
of
the
crew
station
for
assessments
of
visibility
and
legibility,examination
of
anthropometric
characteristics,
and
analyses
of
cockpit
topology
and
configuration.
The
output
of
MIDAS
in
this
mode
corresponds
to
cockpit
geometry
and
external
vision
design
guides,
such
as
MIL-STD-1472
and
AS-580B. |
|
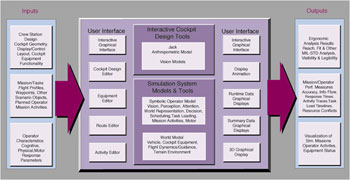
User
View
of
MIDAS
(Click
for
Larger
View)
|
| |
| |
|
|
|
|
|
| |
The
other
analysis
path
supported
by
MIDAS
is
a
dynamic
simulation.
The
Simulation
Mode
provides
facilities
whereby
specifications
of
the
human
operator,
cockpit
equipment,
and
mission
procedures
are
run
in
an
integrated
fashion.
Their
execution
results
in
activity
traces,
task
load
timelines,
information
requirements,
and
mission
performance
measures
which
can
be
analyzed
based
on
manipulations
in
operator
task
characteristics,
equipment,
and
mission
context.
MIDAS
contains
representations
of
human
cognitive,
perceptual
and
motor
operations
in
order
to
simulate
control
and
supervisory
behavior.
These
models
describe
(within
their
limits
of
accuracy)
the
responses
that
can
be
expected
of
human
operators
interacting
with
dynamic
automated
systems.
The
fundamental
human
performance
elements
of
these
representations
can
be
applied
to
any
human-machine
environment.
Tailoring
for
the
particular
requirements
of
a
given
domain,
largely
in
terms
of
human
operator's
knowledge
and
rule-base
is,
of
course,
a
necessary
step
as
the
model
is
moved
among
domains.
Each
of
the
human
operators
modeled
by
MIDAS
contains
the
following
models
and
structures,
the
interaction
of
which
will
produce
a
stream
of
activities
in
response
to
mission
requirements,
equipment
requirements,
and
models
of
human
performance
capabilities
and
limits.
Physical
Representations:
An
anthropometric
model
of
human
figure
dimensions
and
dynamics
has
been
developed
in
conjuntion
with
the
Graphics
Laboratory
of
the
University
of
Pennsylvania.
The
model
used
is
called
Jack
,
and
is
an
agent
in
the
overall
MIDAS
system.
The
Jack
agent's
purpose
is
to
represent
human
figure
data
(e.g.,
size
and
joint
limits)
in
the
form
of
a
mannequin
which
dynamically
moves
through
various
postures
to
represent
the
physical
activities
of
a
simulated
human
operator.
The
graphic
representation
of
the
Jack
agent
also
assists
designers
in
questions
of
cockpit
geometry,
reach
accommodation,
restraint,
egress,
and
occlusion.
Perception
and
Attention:The
simulated
human
operator
is
situated
in
an
environment
where
data
constantly
streams
into
the
operator's
physical
sensors.
While
auditory,
haptic,
and
proprioceptive
systems
serve
an
important
role
in
the
perception
of
information
relevant
to
the
operator
of
vehicles,
within
MIDAS
the
present
focus
has
been
on
modeling
visual
perception.
In
brief,
during
each
simulation
cycle,
the
perception
agent
computes
what
environment
or
cockpit
objects
are
imaged
on
the
operator's
retina,
tagging
them
as
in/out
of
the
peripheral
and
foveal
fields
of
view
(90
and
5
degrees,
respectively),
in/out
of
the
attention
field
of
view
(variable
depending
on
the
task),
and
in/out
of
focus,
relative
to
the
fixation
plane.
An
environmental
object
can
be
in
one
of
several
states
of
perceptual
attention.
Objects
in
peripheral
visual
fields
are
perceived
and
attentionally
salient
changes
in
their
state
are
passed
to
the
updatable
world
representation.
In
order
for
detailed
information
to
be
fully
perceived,
e.g.,
reading
of
textual
messages,
the
data
of
interest
must
be
in
focus,
attended,
and
within
the
foveal
field
of
view
for
200
ms.
The
perception
agent
also
controls
the
simulation
of
commanded
eye
movements
via
defined
scan,
search,
fixate,
and
track
modes.
Differing
stimuli
salience
and
pertinence
are
also
accommodated
through
a
model
of
pre-attention
in
which
specific
attributes,
e.g.
color
or
flashing,
are
monitored
to
signal
an
attentional
shift.
Updatable World Representation (UWR): In MIDAS, the UWR provides a structure whereby each of the multiple, independent human agents, representing individuals and cooperating teams of pilots and flight crews, accesses its own tailored or personalized information about the operational world. The contents of an UWR are determined, first, by pre-simulation loading of required mission, procedural, and equipment information. Then data is updated in each operator's UWR as a function of the perceptual mechanisms previously described. The data of each operator's UWR is operated on by daemons and rules to guide behavior and are the sole basis for a given operator's activity. Providing each operator with his/her own UWR accounts for the significant operational reality that different members of a cooperating control team have different information about the world in which they operate. Further, the individual operator may, or may not, receive a piece of information available to the sensory apparatus as a function of perceptual focus at the relevant point in the mission. It is of some significance that, while ideally the human operators' representation of the world would be consonant with the state of the world, in fact, this is rarely the case. The capability for both systematic and random deviation from the ground truth of the simulation world is a critically necessary component of any system that intends to represent and analyze non-trivial human performance.
The organization of perceptual data and knowledge about the world in an UWR is accomplished through a semantic net, a linked structure of object nodes that represent concepts. The relationship among these nodes is expressed as a "strength" or relatedness, where the strength of such relationships has been investigated to guide models of memory dynamics, i.e., interference, decay and rehearsal. |
| |
|
|
|
|
|
|
|
|